Diamond¶
Parametric¶
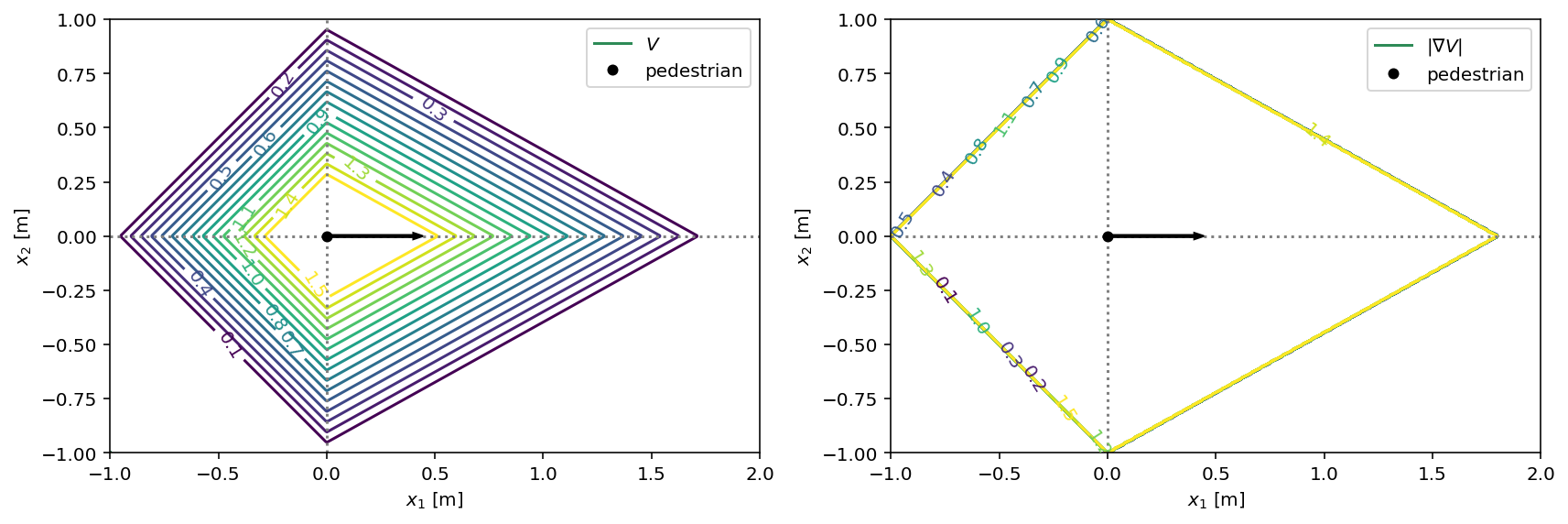
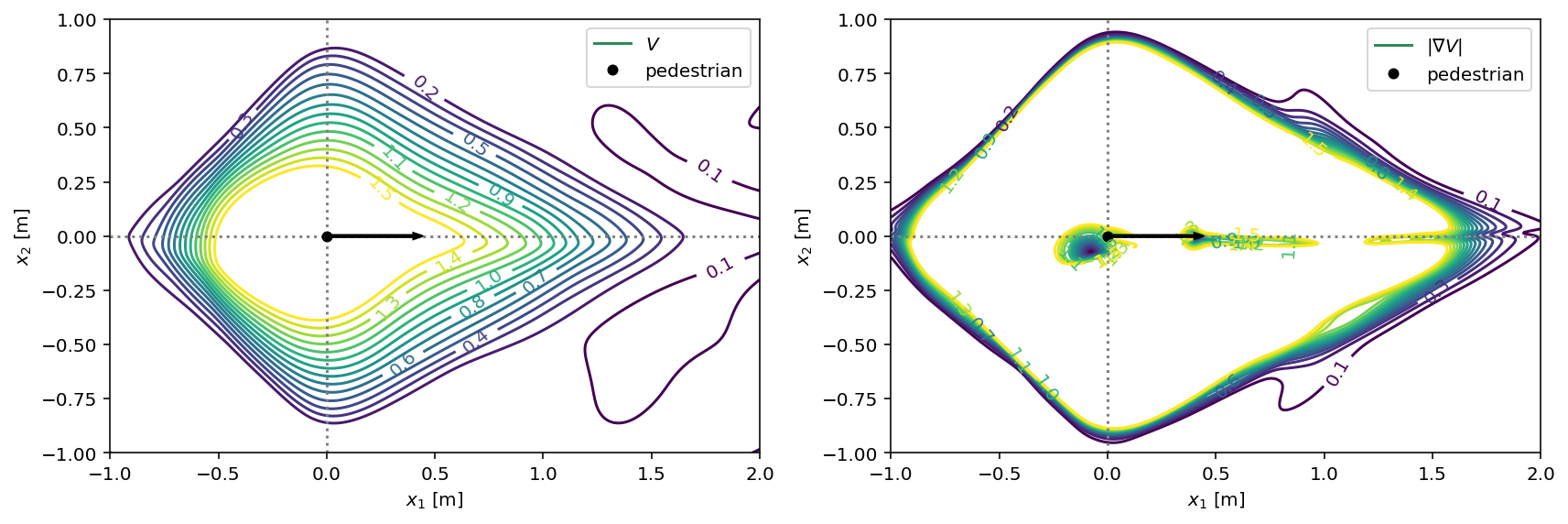
This is an extension of the 2D example to study the robustness of the inference process to potentials with gradients that change orientation. We use a modified \(V(b)\) potential that could be described as a “diamond” of height \(V_0\) and with a half-width of \(\sigma\):
with its two parameters \(V_0\) and \(\sigma\).
socialforce.FieldOfView.out_of_view_factor = 0.0
V = socialforce.potentials.PedPedPotentialDiamond(sigma=0.5)
with socialforce.show.canvas(figsize=(12, 6), ncols=2) as (ax1, ax2):
socialforce.show.potential_2d(V, ax1)
socialforce.show.potential_2d_grad(V, ax2)
Scenarios¶
Now we use the above parametric potential in a simulation to generate synthetic scenarios according to this potential. We generate Circle and ParallelOvertake scenarios.
circle = socialforce.scenarios.Circle(ped_ped=V)
parallel_overtake = socialforce.scenarios.ParallelOvertake(ped_ped=V)
parallel_avoidance = socialforce.scenarios.ParallelAvoidance(ped_ped=V)
scenarios = circle.generate(50) + parallel_overtake.generate(50) + parallel_avoidance.generate(150)
true_experience = socialforce.Trainer.scenes_to_experience(scenarios)
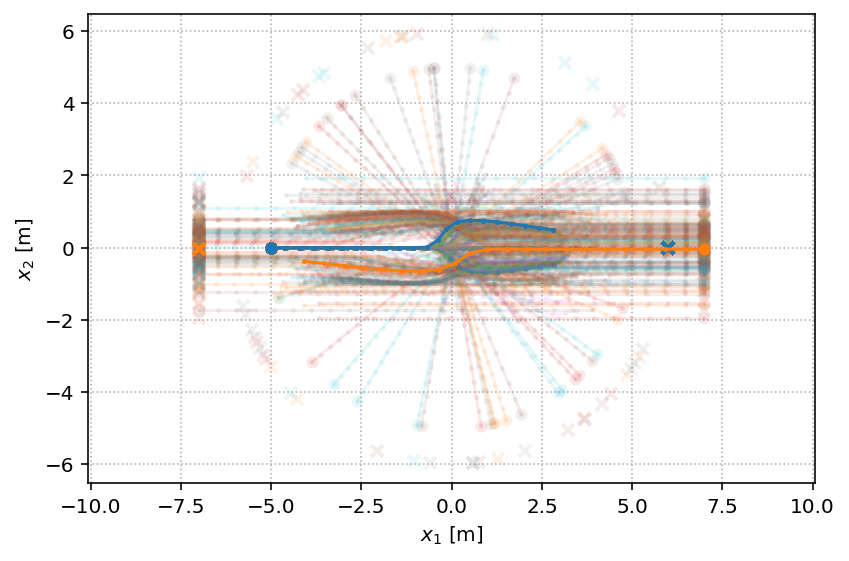
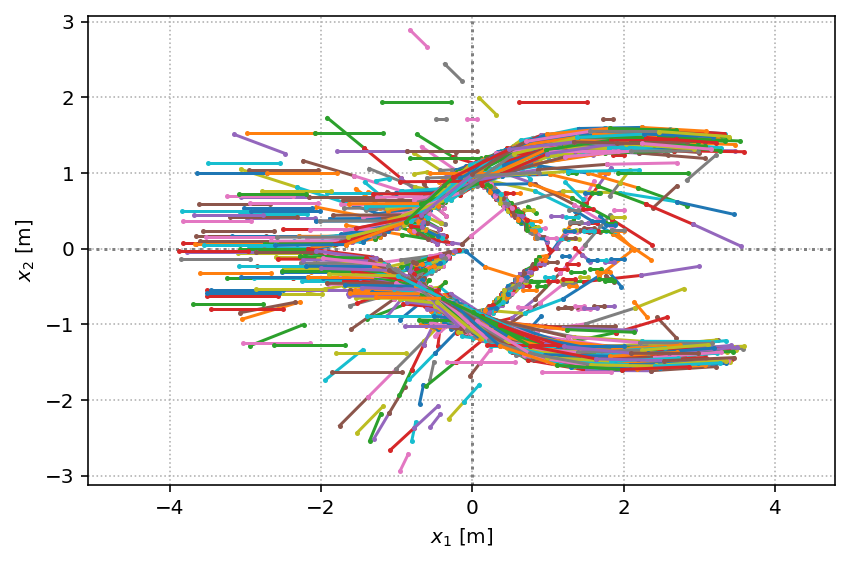
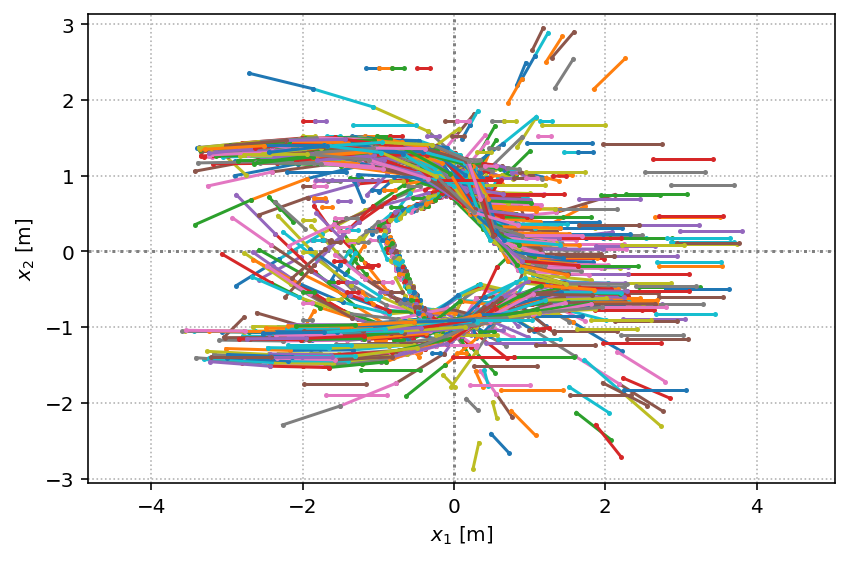
All the scenes from a fixed observer:
# HIDE CODE
with socialforce.show.track_canvas() as ax:
socialforce.show.states(ax, scenarios[-1], zorder=10)
for scene in scenarios[:-1]:
socialforce.show.states(ax, scene, alpha=0.1)
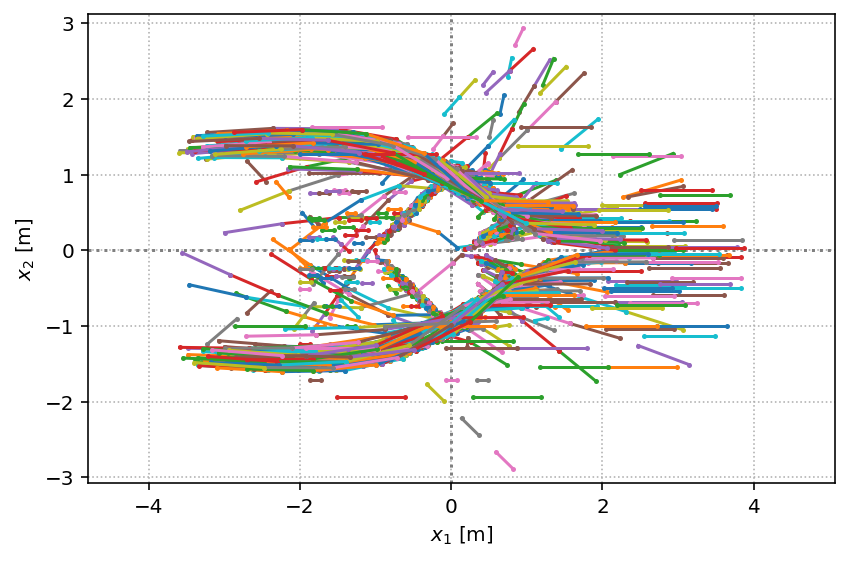
Parallel Overtake and Avoidance scenes from the perspective of the primary pedestrian:
# HIDE CODE
with socialforce.show.track_canvas() as ax:
socialforce.show.experience(ax, true_experience)
From the perspective of the other pedestrian:
# HIDE CELL
with socialforce.show.track_canvas() as ax:
socialforce.show.experience(ax, true_experience, reference_ped=1)
MLP Inference¶
We construct an coordinate-based MLP with Fourier Features [RR+07, TSM+20].
V = socialforce.potentials.PedPedPotentialMLP2D(hidden_units=32, n_hidden_layers=3)
with socialforce.show.canvas(figsize=(12, 6), ncols=2) as (ax1, ax2):
socialforce.show.potential_2d(V, ax1)
socialforce.show.potential_2d_grad(V, ax2)
/home/runner/work/socialforce/socialforce/socialforce/show.py:253: UserWarning: No contour levels were found within the data range.
ax.contour(x1, x2, values.T,
simulator = socialforce.Simulator(ped_ped=V)
opt = torch.optim.SGD(V.parameters(), lr=0.03, momentum=0.9, nesterov=True)
# socialforce.Trainer(simulator, opt).loop(10, true_experience) # does not work
with socialforce.show.canvas(figsize=(12, 6), ncols=2) as (ax1, ax2):
socialforce.show.potential_2d(V, ax1)
socialforce.show.potential_2d_grad(V, ax2)
Fourier Features¶
We construct an coordinate-based MLP with Fourier Features [RR+07, TSM+20]. This coordinate-based MLP with the Fourier Feature operator FF is:
V = socialforce.potentials.PedPedPotentialMLP2D(
hidden_units=64, n_hidden_layers=2, n_fourier_features=64, tanh_range=3.0, fourier_scale=3.0)
with socialforce.show.canvas(figsize=(12, 6), ncols=2) as (ax1, ax2):
socialforce.show.potential_2d(V, ax1)
socialforce.show.potential_2d_grad(V, ax2)
# HIDE OUTPUT
simulator = socialforce.Simulator(ped_ped=V)
opt = torch.optim.SGD(V.parameters(), lr=0.03, momentum=0.9, nesterov=True)
socialforce.Trainer(simulator, opt).loop(10, true_experience)
epoch 1: 0.015041447569032392
epoch 2: 0.009004531869431643
epoch 3: 0.007789137978996948
epoch 4: 0.00705370857701363
epoch 5: 0.006828486191971782
epoch 6: 0.00648589138611507
epoch 7: 0.006311069075588899
epoch 8: 0.0064089279589596045
epoch 9: 0.0059767859865988105
epoch 10: 0.005932234657303206
with socialforce.show.canvas(figsize=(12, 6), ncols=2) as (ax1, ax2):
socialforce.show.potential_2d(V, ax1)
socialforce.show.potential_2d_grad(V, ax2)
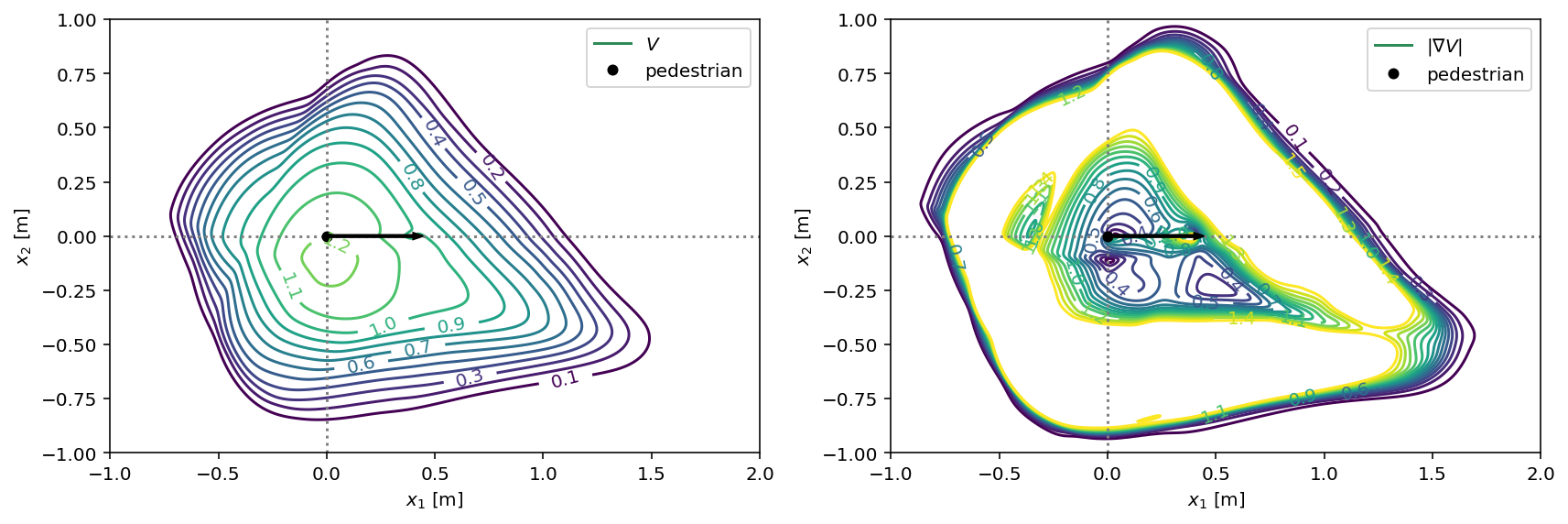
Asymmetric¶
We can redo the above steps with an asymmetric version of the diamond potential. This refines the previous model by a short training on the scenarios generated with the modified potential.
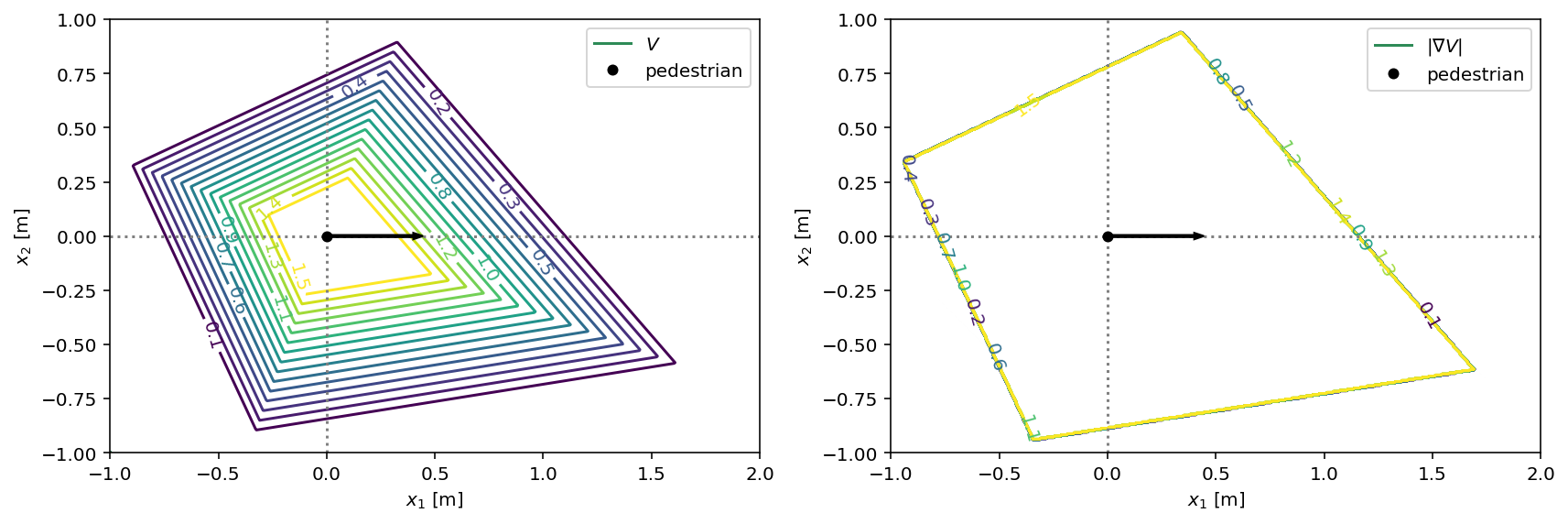
V_asym = socialforce.potentials.PedPedPotentialDiamond(sigma=0.5, asymmetry_angle=-20.0)
with socialforce.show.canvas(figsize=(12, 6), ncols=2) as (ax1, ax2):
socialforce.show.potential_2d(V_asym, ax1)
socialforce.show.potential_2d_grad(V_asym, ax2)
circle_asym = socialforce.scenarios.Circle(ped_ped=V_asym)
parallel_overtake_asym = socialforce.scenarios.ParallelOvertake(ped_ped=V_asym, b_center=0.25)
parallel_avoidance_asym = socialforce.scenarios.ParallelAvoidance(ped_ped=V_asym, b_center=-0.25)
scenarios_asym = circle_asym.generate(50) + parallel_overtake_asym.generate(50) + parallel_avoidance_asym.generate(150)
true_experience_asym = socialforce.Trainer.scenes_to_experience(scenarios_asym)
From the perspective of the primary pedestrian:
# HIDE CODE
with socialforce.show.track_canvas() as ax:
socialforce.show.experience(ax, true_experience_asym)
# HIDE OUTPUT
socialforce.Trainer(simulator, opt).loop(10, true_experience_asym)
epoch 1: 0.009228332611718343
epoch 2: 0.006972365520796904
epoch 3: 0.006454007300254202
epoch 4: 0.006139285584868661
epoch 5: 0.006026841439435587
epoch 6: 0.005688764077679059
epoch 7: 0.005738585170912209
epoch 8: 0.006114561652627816
epoch 9: 0.005619343535467566
epoch 10: 0.005792415339311301
with socialforce.show.canvas(figsize=(12, 6), ncols=2) as (ax1, ax2):
socialforce.show.potential_2d(V, ax1)
socialforce.show.potential_2d_grad(V, ax2)